《机器学习》笔记(第五部分:特征选择与稀疏学习、半监督学习、概率图模型)
11 特征选择与稀疏学习
11.1 子集搜索与评价
子集搜索 考虑子集搜索 (subset search) 问题:
- 前向 (forward) 搜索: 从空集开始, 每次添加一个属性, 直到模型最优;
- 后向 (backward) 搜索: 从全集开始, 每次删除一个属性, 直到模型最优;
- 双向 (bi-directional) 搜索: 从空集或全集开始, 每次考虑添加或删除一个属性, 直到模型最优.
子集评价 考虑子集评价 (subset evaluation) 问题: 给定数据集 D, 假定 y 类样本占比为 py. 定义信息熵
EntD=−y∑pylbpy
假定属性子集 A 将 D 做了一个不交的划分 D=D1∪⋯∪DV. 定义信息增益
GainDA=EntD−v∑∣D∣∣Dv∣EntDv
信息增益 GainDA 越大, 意味着特征子集 A 包含的信息越多. 可以以此作为评价准则.
将子集搜索与子集评价结合, 就可以得到特征选择方法. 例如前向搜索与信息熵相结合就是决策树算法. 常见的特征选择方法包括过滤式 (filter)、包裹式 (wrapper) 和嵌入式 (embedding).
11.2 过滤式选择
过滤式方法是最普通的特征选择方法: 先选择特征、再训练学习器, 特征选择与后续学习完全无关. Relief (Relevant Features), 是一种过滤式选择方法, 它给每一个特征评一个分 (称为相关统计量) 来度量其重要性.
给定数据集 D={(x(i),y(i))}i=1m, Relief 方法定义样本 x(i) 的猜中近邻 (near-hit) u(i) 和猜错近邻 v(i) 分别为 x(i) 的最近同类样本和异类样本. 然后定义关于第 k 维的相关统计量
δk=i∑(−d(xj(i),uj(i))2+d(xj(i),vj(i))2)
其中 d(⋅,⋅) 是距离函数. 对于离散属性, 可取 0-1 距离; 对于离散属性, 可将 {xj(i)}i 规范化后取绝对值距离. 该分数分为两部分: 猜中近邻越远分数越低, 猜错近邻越远分数越高.
Relief 是为二分类问题而设计的. 其扩展变体 Relief-F 用于处理多分类问题. 假设定义 x(i) 类别为 y 的最近邻为 v(i)(y), 则修正
δk=i∑(−d(xj(i),uj(i))2+y=yi∑p(y)d(xj(i),vj(i)(y))2)
其中 py 为类别 y∈Y 的频率.
11.3 包裹式选择
包裹式选择直接把学习器性能作为特征子集的评价准则. LVW (Las Vegas Wreapper) 是一个典型的包裹式特征选择方法, 它在 Las Vegas 方法框架下使用随机策略来自己搜索, 以分类器误差作为特征子集的评价准则. 具体地, LVW 方法随机选取若干个特征子集, 计算每一个特征子集训练出的学习器的交叉验证误差, 然后选择误差率最低的那一个 (若误差率相等, 则特征数最少的那一个) 作为最终的分类器.
11.4 嵌入式选择、岭回归与 LASSO 回归
嵌入选择将特征选择与学习器两个优化目标合为一个进行. 它同时考虑学习器是否合理以及特征选择是否合理, 故它的优化目标是两项的和. 简单线性回归中的优化目标是
wmini∑(yi−wTx)2
另外我们希望 w 的复�杂程度尽量小. 这种复杂程度可以以某一个范数 ∣w∣ 刻画. 所以最终的优化目标是
wmini∑(yi−wTx)2+λ∣w∣
其中 λ>0 是正则化系数. 若范数取 Euclid 范数, 则回归任务称为岭回归 (ridge regression); 若取 Manhattan 范数, 则称为 LASSO (Least Absolute Shrinkage and Selection Operator) 回归. 岭回归和 LASSO 回归都有助于降低过拟合风险, 其中岭回归更容易获得稀疏 (sprase) 解, 即 w 中的零分量会更多.
LASSO 回归的求解可以使用近端梯度下降 (PGD, Proximal Gradient Descent) 解决. PGD 算法在每一个迭代步骤中将目标函数近似为一个二次函数, 然后求其最小值. 对于一个优化问题
xminf(x)+λ∣∣x∣∣1
若 f 可导且 ∇f 满足 L-Lipschitz 条件, 即
∣∣x′−x′′∣∣22∣∣∇f(x′)−∇f(x′′)∣∣22≤L,∃L>0,∀x′,x′′
选定一个初值 x0, 则优化目标可在 x0 附近二阶 Taylor 展开成二次函数的形式. 这个函数形式的最小值点位于
x1=x0−L∇f(x0)
首轮迭��代最小值点 x1 明确后, 又可以迭代地获得下一轮的最小值点, 如此反复直到收敛.
在 LASSO 回归中, 我们选定一个初值 x0 并计算首次迭代点 x1=x0−nablaf(x0)/L. 然后后续的所有迭代点都有解析解
xk+1,i=⎩⎨⎧zki−λ/L,zki+λ/L,0,zki>λ/Lzki<−λ/LOtherwise
其中 zk=(zk1,…,zkm)=xk−∇f(xk)/L.
11.5 稀疏表示与字典学习
稀疏编码 (sparse coding) 问题考虑如何将样本矩阵稀疏化, 让其出现大量零值. 字典学习 (dictionary learning) 是稀疏编码的一种方法, 它尝试将样本 D={xi∈Rd}i=1m 通过一个降维矩阵 (称为字典) B∈Rd×k 降维到一个指定维数 k (称为字典的词汇量) 的新表示 {αi∈Rk}i=1m, 并且希望新表示尽可能稀疏. 该问题与 LASSO 回归问题的目标函数形式一致, 但是决策变量不同:
B,αimini∑(∣∣xi−Bαi∣∣22+λ∣∣αi∣∣1)
其中 Bαi 是基于投影 αi 复原的旧坐标. 该问题有 kd+km 个决策变量, 难以求解.
可以用变量交替优化的策略求解该问题. 第一步, 取一个随机的初值字典 B 且固定住, 然后求解 LASSO 回归问题:
αi←αiargmini∑(∣∣xi−Bαi∣∣22+λ∣∣αi∣∣1)
得到一组 αi 后将其固定, 然后更新字典 B:
B←Bargmini∑(∣∣xi−Bαi∣∣22)
该步骤可以使用基于逐列更新策略的 KSVD 方法求解. 重复上面两步, 直到收敛.
11.6 压缩感知
假设对一个原始信号 x∈Rm 用一个测量矩阵 Φ∈Rn×m 采样, 得到了一个采样信号 y=Φx∈Rn 且采样维度 n≪m. 若只知道测量矩阵 Φ 和采样信号 y, 当然是无法还原出原始信号 x 的. 但是如果原始信号 x 是由一个稀疏信号 s∈Rm 通过一个线性变换 Φ∈Rm×m 产生的, 即 x=Ψs, 则有
y=ΦΨs=:As
由于 s 的稀疏性, 此时由采样信号 y 还原出稀疏信号 s, 然后还原出原始信号 x=Ψs 是可能的.
压缩感知分为感知测量和重构恢复两个阶段:
- 感知测量考虑如何将样本稀疏化, 方法包括 Fourier 变换、小波变换、字典学习、稀疏编码等;
- 重构恢复是压缩感知的核心, 关注如何将稀疏样本恢复成原信号.
限定等距性 对于一个降维矩阵 A∈Rn×m (n≪m) 若 ∃δk∈(0,1) 使得 ∀s∈Rk 和 ∀Ak∈Rn×k 是 A 的子矩阵都有
1−δk≤∣∣s∣∣22∣∣Aks∣∣22≤1+δk
则称 A 满足 k-限定等距性 (k-RIP, Restricted Isometry Property).
若 A=ΦΨ 满足 k-限定等距性, 则可以从 y 中恢复出 s, 从而还原 x:
smin∣∣s∣∣0,s.t.y=As
这本是一个 NP 难问题. 但是此处, L0 范数优化与 L1 范数优化是同解的. 所以该问题可以转化为一个优化目标为 ∣∣s∣∣1=min 的 LASSO 回归问题.
矩阵补全 假设一个矩阵 A∈(R∪{∅})n×m=(aij) 有大量缺失值, 非缺失值的坐标记录在一个集合 Ω={(i,j)} 中. 现在希望恢复一个低秩矩阵 X=(xij) 来对这些缺失值进行填补. 即
XminrankX,s.t.xij=aij
这也是一个 NP 难问题. 定义矩阵 X 的核范数 (nuclear norm) 或迹范数 (trace norm) ∣∣X∣∣nucl 是矩阵所有奇异值之和. 该问题的优化目标等价于 ∣∣X∣∣nucl. 此时该问题可以通过半正定规划求解.
理论研究表明, 通常只需观察到 O(rankA⋅mlog2m) 个元素就能完美恢复出 A.
13 半监督学习
13.1 未标记样本
考虑一个样本集 D=L∪U, 其中 L={(ℓi,yℓi)}i=1nℓ 是有标记 (labeled) 样本, 而 U={ui}u=1nu 是未标记 (unlabeled) 样本.
主动学习 用 L 训练一个模型, 然后在 U 中不断选出对改善模型性能帮助最大的样本并人工打标签 (称为查询, query). 该过程称为主动学习 (active learning).
半监督学习 U 虽然未直接包含标记信息, 但包含了数据分布的信息, 对建立模型有帮助. 学习器不依赖外界、自动利用 U 提升学习性能的过程称为半监督学习 (semi-supervised learning). 半监督学习分为两类:
- 纯 (pure) 半监督学习: 假定 U 并非待预测数据. 基于开放世界假设, 希望模型适用于 D 以外的数据.
- 直推学习 (transductive learining): 假定 U 恰是待预测数据. 基于封闭世界假设, 仅试图对 U 进行预测.
利用 U 必须要�做出一些 U 解释的数据分布信息与标记之间联系的假设. 常见的假设有:
- 聚类假设 (cluster assumption): 假设数据存在簇结构, 同簇样本属于同一类别.
- 流形假设 (manifold assumption): 假设数据分布在一个流形上, 邻近的样本具有相似的输出值.
13.2 生成式方法
生成式方法 (generative methods) 假设所有数据都来源于同一个分布族, 此时模型参数与学习目标联系起来. 未标记数据的标记看作模型的缺失数据, 此时可以利用 EM 算法做极大似然估计.
以 Gauss 混合分布为例, 给定样本 x, 其真实类别标记为 y∈Y={1,…,N}. 假设样本服从 Gauss 混合分布:
x∼MixN(θ),θ={(αi,μi,Σi)}i=1k
Gauss 混合分布的密度是
p(x)=ι∑αιφ(x∣μι,Σι)
定义样本 x 属于类别 i 的概率:
p(x,i):=Pr(y=i∣x)=p(x)αiφ(x∣μi,Σi)
这里采用 EM 算法求解参数的极大似然估计. 这里的观测数据是所有自变量 {ℓj}∪{uj} 以及有标签数据 ℓj 属于类别 i 的概率 piℓj:=Pr(yℓj=i)=1(yℓj=i). 缺失数据是无标签数据 uj 属于类别 i 的概率 piuj:=Pr(yuj=i). E-步考虑缺失数据的期望:
piuj=p(uj,i)
这里 M-步考虑观测数据的对数似然最大化问题
LL=(x,y)∈L∑(p(x)⋅p(x,i))+x∈U∑p(x)=max
此时的参数为
⎩⎨⎧μi=∑jpiℓj+∑jpiuj∑jℓjpiℓj+∑jujpiujΣi=∑jpiℓj+∑jpiuj∑jpiℓj(ℓj−μi)(ℓj−μi)T+∑jpiuj(uj−μi)(uj−μi)Tαi=nℓ+nu∑jpiℓj+∑jpiuj
以上过程不断迭代直到收敛, 即可获得模型参数. 对于新样本 x, 尝试最大化后验概率 argmaxi∈Yp(x,i) 即可作为预测.
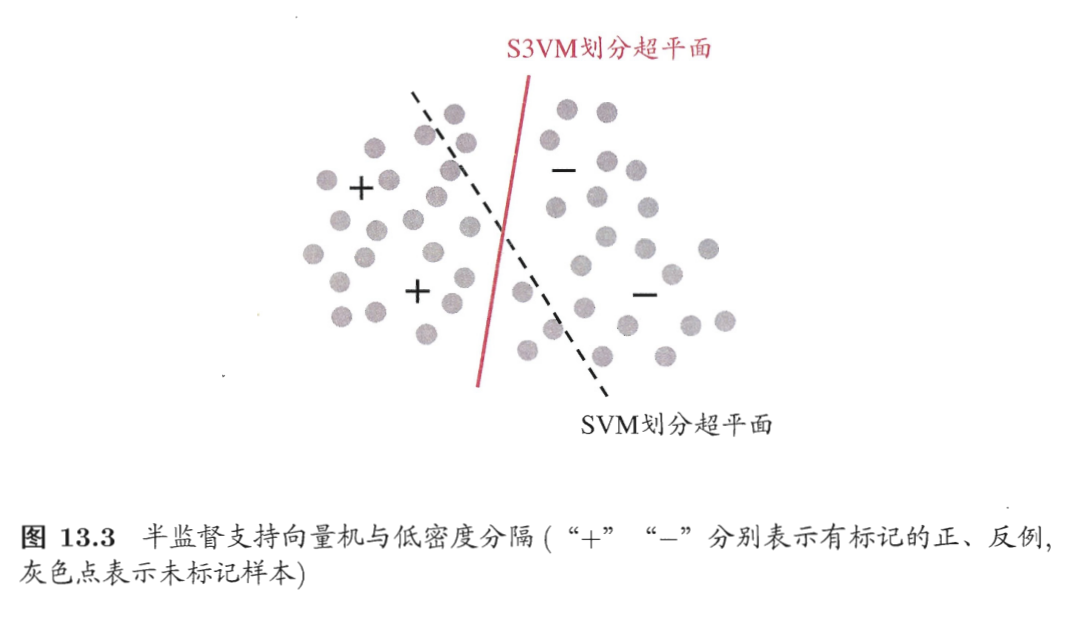
13.3 半监督支持向量机 S3VM
半监督支持向量机 (S3VM, Semi-Supervised SVM) 是支持向量机在半监督学习上的推广. S3VM 试图找到一个能将两类样本分开, 并且穿过数据低密度区域的划分超平面.
TSVM (Transductive SVM) 是一种著名的 S3VM, 它尝试给 U 中的样本指派一个最优类别. 给定样本 L∪U={(ℓi,yℓi)}i=1nℓ∪{(ui,yui)}i=1nu, 其中 yℓi,yui∈B={±1}. TSVM 尝试找到一组最优的分割超平面参数 w,b、最优的松弛变量 ξ��ℓi,ξui 和最优的预测标记 y^ui, ��使得
w,b,ξℓi,ξui,y^uimins.t.21∣w∣+CL∑ξℓi+CU∑ξui⎩⎨⎧yℓi(wTℓi+b)≥1−ξℓiy^ui(wTui+b)≥1−ξuiξℓi,ξui≥0,y^ui∈B
这是一个 0-1 规划问题, 复杂度是 O(2nu). 复杂度高主要是因为对 U 样本类别的指派需要枚举. TSVM 采用局部搜索的策略寻找近似解, 要点如下:
- 仅使用 L 中的数据训练一个 SVM, 然后用其为 U 做预测 (称为伪标记, pseudo-label) 进行标记指派 (label assignment).
- 使用 L 和指派后的 U 训练一个 SVM. 注意此处初始化权重应该 CU≪CL.
- 考虑一对指派为异类, 且很可能分类出错的样本. 例如
(ℓi,ℓj)s.t.y^ℓi=+1,y^ℓj=−1,ξℓi>0,ξℓj>0,ξℓi+ξℓj>2
然后交换其指派类别, 再重新训练 SVM. 重复该过程, 直到找不到这样的样本对为止.
- 增大权重 CU, 例如 CU←min(2CU,CL) 然后重新进行上一步 直到 CU=CL 为止.
训练中可能会出现样本类别不平均的问题. 此时可将 CU 拆解为 CU+ 和 CU− 两项, 分别对应 U 中被指派的正反样本. 然后保持
CU+⋅∣{y^ui=+1}∣=CU−⋅∣{y^ui=−1}∣
即可.
13.4 图半监督学习
13.4.1 二分类问题
考虑标记传播 (label propagation) 方法. 给定一个数据集, 可将每个样本看成一个节点, 样本之间的边强度 (strength) 正比于样本之间的相关性. 将 L 视为染色的样本, 现在要将颜色扩散至未染色的 U 样本. 给定
L={(xi,yi)}i=1nℓ,U={(xi,yi)}i=nℓ+1nℓ+nu,nℓ≪nu,nℓ+nu=n
定义样本间距离为
d(xi,xj)=exp−2σ2∣xi−xj∣2
样本距离构成的矩阵 W=(d(xi,xj))m×m 称为亲和矩阵 (affinity matrix). σ>0 是 Gauss 带宽 (构图参数).
图半监督学习试图习得一个函数 f:X→R, 使得分类规则 y=sgnf(x)∈B. 我们希望相似的样本能被 f 预测出相似的标记, 所以定义 f 的能量函数 (energy function) 为
E(f)=21i∑j∑d(xi,xj)(f(xi)−f(xj))2=fT(D−W)f=min
这是一个二次型. 其中 f=(f(x1),…,f(xnℓ+nu))T 是预测结果向量, W=diagW1 是亲和矩阵行和 (等价于列和) 向量生成的对角矩阵.
现在求解最优的 f. 考虑分块矩阵
W=(WLWULWULTWU),D=(DLOODU),f=(fLfU)
优化目标可重写为
E=fLT(DL−WL)fL−2fUTWULfL+fUT(DU−WU)fU=min
最优 f 需要满足在 L 上预测完全准确且在 U 上有 (D−W)f=0. 相较于考虑连续的 f, 我们只需考虑 f 在 U 上的预测值 (即 fU) 即可. 所以考虑 ∂E/∂fU=0 可得
fU=(DU−WU)−1WULfL
为了简化上式, 考虑
P=D−1W=(DL−1OODU−1)(WLWULWULTWU)=(DL−1WLDU−1WULDL−1WULTDU−1WU)=:(PUPUL∗∗)
于是有
fU=(I−PU)−1PULfL
即最优解 fU 是 fL 的线性变换. 将 L 中的标签 (y1,…,ynℓ) 作为 fL 代入即可得到 U 的预测标签.
13.4.2 多分类问题
考虑 yi∈Y 是多分类标签. 考虑标记矩阵 Y∈[0,1](nℓ+nu)×∣Y∣, 其中第 i 行的 ∣Y∣ 个元素表示该样本属于每个类别的概率. 对于前 nℓ 行, 将其初始化为 1yi=j, 对于后 nu 行全部置 0.
初始化一个迭代矩阵 F=Y. 基于 W 构造一个标记传播矩阵 S=D−1/2WD−1/2, 于是��有迭代计算式
F←αSF+(1−α)Y
其中 α∈(0,1) 是折中参数. 上面的迭代式收敛于
F∗=(1−α)(I−αS)−1Y
获得收敛的 F∗ 后, 检查其后 nu 行, 并取每一行值最大的类别作为 U 标签的拟合结果.
13.5 基于分歧的方法
基于分歧的方法 (disagreement-based methods) 使用多学习器产生标记, 而学习器之间的分歧 (disagreement) 对未标记数据的利用至关重要.
多视图数据 一个数据对象可能有多个属性集 (attribute set), 即 A={A(1),…,A(d)}, 每一个属性集中包含若干属性 A(i)={a1(i),…,adi(i)}. 一个属性集构成一个视图 (view), 则称该数据集为多视图 (multi-view) 数据. 记样本在属性集 A(i) 中各维度的取值为 x(i), 则它有输出 y(i). 以 d=2 为例, 该样本可以描述为 {(x(1),y(1),x(2),y(2))}. 这是单个样本, 它有 d1+d2 个输入和 2 个输出.
相容互补性 若各个属性集的输出是相同的, 即样本可以描述为 (x(1),x(2),y) 的形式. 它有 2 个输入和 1 个输出, 则称不同视图具有相容性 (compatibility). 另一方面, 若基于 A(1) 和 A(2) 的学习器分别给出了相同的 y, 则有很大的把握认定 y 是正确的. 即相容性基础上互补性会给学习器构建带来便利.
协同训练 协同训练 (co-training) 是基于分歧的方法的代表. 协同训练考虑 2 个学习器, 每次互相将自身认为最有把握的无标签数据打上伪标签, 并作为对方下轮训练的有标签数据. 假设输入数据由相同标签的 L(1)={(xi(1),yi)}i 和 L(2)={(xi(2),yi)}i 构成, 则协同训练的算法要点如下:
- 从 U 中抽取样本进入缓冲池 Us, 补满 ns 个样本.
- 使用数据集 L(1) 训练学习器 h(1). 考察 h(1) 在 Us 样本上的分类置信度, 挑选 np 个置信度最高的正例和 nn 个置信度最高的反例, 将其加入 L(2) 并从缓冲池 Us 删除.
- 对数据集 L(2) 做同样的事情, 并且根据置信度更新 L(1).
- 若 h(1),h(2) 无变化或迭代次数到达阈值, 则结束学习; 反之回到步骤 1.
单视图数据可以使用协同训练的一些变体算法. 仅需弱学习器之间有显著的分歧, 即可通过相互提供伪标记样本的方式提高泛化性能.
13.6 半监督聚类
虽然聚类是无监督学习任务, 但是如果对样本有额外��监督信息, 则可加以利用获得更好聚类效果.
包含必连勿连信息的约束 k-均值算法 给定样本集合 D={x(i)}i=1m, 监督信息包含以下两类:
- 必连 (must-link): 已知两个样本必属于同一簇, 记录必连约束集合 M={(x(i),x(j))}.
- 勿连 (cannot-link): 已知两个样本必属于同一簇, 记录勿连约束集合 C={(x(i),x(j))}.
半监督聚类考虑了约束 k-均值 (Constrained k-means) 算法, 该算法与一般的 k-均值算法唯一的区别在于, 计算样本与均值向量距离时应考虑最近的且不违背 M 和 C 约束的那一类.
包含少量有标记样本的约束种子 k-均值算法 假定一些已知类别的样本 Sj⊆D 属于第 j 类. 此时可以考虑约束种子 k-均值 (Constrained Seed k-means) 算法, 它与 k-均值算法唯一区别在于它初始化均值 μj 为 Sj 的重心, 并在开始时先将 Sj 的所有样本直接标为第 j 类.
14 概率图模型
一个模型的变量分为三类: 所关心的变量 Y, 可观测的变量 O 和其它变量 R. 概率模型 (probabilistic model) 将学习任务归结于计算变量的概率分布. 常见模型分为两类:
- 生成式 (generative) 模型, 考虑联合分布 p(Y,R,O);
- 判别式 (discriminative) 模型, 考虑条件分布 p(Y,R∣O).
而推断 (inference) 根据生成式模型或判别式模型获得显式输出 p(Y∣O).
概率图模型 概率图模型 (probabilistic graphical model) 用一张图表达变量相关关系. 概率图模型分为两类:
- 用有向无环图表达变量间关系的有向图模型或 Bayes 网;
- 用无向图表达变量间关系的无向图模型或 Markov 网.
14.1 隐 Markov 模型 HMM
隐 Markov 模型是一个时间序列模型, 它考虑一个无法观测的隐变量 (hidden variable) 时间序列随机变量 {yt}t=1n, 取值于 S={si}i=1N. 它又考虑一个可观测的观测变量时间序列随机变量 {xt}t=1n, 取值于 Σ={σi}i=1N. 隐 Markov 模型假设 xt 的值仅由 yt 决定, 且 yt 的值仅由 yt−1 决定.
所以隐 Markov 模型是一个关于观测变量时间序列和隐变量时间序列 (x,y)=(x1,y1,…,xn,yn) 的模型. 它有三个参数:
- 状态转移概率 yt 的值仅由 yt−1 决定. 定义 Markov 链的状态转移概率矩阵为
A=(aij)N×N,aij=Pr(yt=sj∣yt−1=si)
- 输出观测概率 xt 的值仅由 yt 决定. 定义观测变量的分布列, 以输出观测概率矩阵给出:
B=(bij)N×M,bij=Pr(xt=σj∣yt=si)
- 初始状态概率 模型在初始时刻各状态出现的概率, 以向量形式给出:
π=(π1,…,πN),πi=Pr(y1=si)
于是隐 Markov 模型可以表示为
(x,y)∼HMM(A,B,π)
在实际应用中, 人们关注隐 Markov 模型的三类问题:
- 给定参数 (A,B,π), 如何计算观测变量的分布列 Pr(x=(σi1,…,σin))?
- 给定参数 (A,B,π) 和观测变量 x, 如何计算最可能的隐变量 y 分布?
- 给定观测变量 x, 如何计算最可能的参数 (A,B,π)?
基于 Markov 链的条件独立性假设
Pr(yt=si∣yt−1,yt−2,y1)=Pr(yt=si∣yt−1)
隐 Markov 模型的这三个问题均能被高效求解.
14.2 Markov 随机场 MRF
Markov 随机场 (MRF, Markov Random Field) 是典型的 Markov 网. 它是一个无向图, 节点之间的边表示变量间依赖关系.
团与极大团 图的全连接子集称为一个团 (clique). 平凡地, 任何相连的两个节点都构成一个团. 一个极大全连接子集称为一个极大团 (maximal clique).
势函数 设节点集为 V. 势函数 (potential functions) 或因子 (factor) 是定义在变量子集上的非负函数 ψ:R∣Q∣→R0+, 它用于定义概率分布. 考虑所有可能的团 Q 构成的集合 C:={Q}, 因为各个团之间概率相互独立, 所以样本的联合概率定义为
p(x)∝Q∈C∏ψQ(xQ)
其中 ψQ(⋅) 是团 Q 对应的势函数. 也可以仅考虑极大团 Q∗ 构成的集合 C∗:={Q∗}, 则样本的联合概率定义为
p(x)∝Q∗∈C∗∏ψQ∗(xQ∗)
分离集 假设删除节点集 C 后, 所有节点被分为 A 和 B 两个非联通节点集, 则称 C 是一个分离集 (separating set).
全局 Markov 性 Markov 随机场有全局 Markov 性 (global Markov property): 对于被节点集 C 分离的节点集 A 和 B, 可以证明 A 和 B 在给定 C 的条件下独立, 即
p(xA,xB∣xC)=p(xA∣xC)p(xB∣xC)
记为 xA⊥xB∣xC. 这是因为在 Markov 随机场中 (A,C) 和 (B,C) 分别是团, 所以其概率密度
ψAC(xA,xC)ψBC(xB,xC)
可以写成因子分解的形式.
全局 Markov 性有两个重要推论:
- 局部 Markov 性 (local Markov property) 令 a 是一个节点, n(a) 是其邻接节点集 (即 a 的 Markov 毯, Markov blanket), V 是全集, 则
xa⊥xV∖({a}∪n(a))∣xn(a)
- 成对 Markov 性 (pairwise Markov property) 令 a,b 是一对非邻接节点, V 是全集, 则
xa⊥xb∣xV∖{a,b}
势函数的取值 势函数 ψ:R∣Q∣→R0+ 的作用是刻画变量相关关系, 它与变量概率分布成正比. 例如我们希望 xA=xC 概率大, 则可以取
ψAC(xA,xC)={1.5,0.1,xA=xCOtherwise
为了满足非负性, 势函数可以通过一个普通实值函数做负指数变换得到
ψQ(xQ)=exp−HQ(xQ�)
其中 HQ:R∣Q∣→R 是一个实值函数, 常见形式为
HQ(xQ)=u=v∑αuvxuxv+u∑βuxu
其中第一项考虑节点间关系, 第二项考虑单节点.
14.3 条件随机场 CRF
令 x={xi}i=1n 是观测序列, y={yi}i=1n 是对应的标记序列. 标记序列可以是有无向图结构的, 例如自然语言处理中的线性数据 (词性标注) 和树形数据 (句子语法结构分析).
条件随机场 令节点集 V 构成一个无向图. 对于节点 v∈V, 令 yv 表示 v 对应的标记变量, n(v) 表示 v 的邻接节点集, 若 ∀v∈V 都满足 Markov 性, 即
p(yv∣x,yV∖{v})=p(yv∣x,yn(v))
则 (x,y) 构成一个条件随机场 (CRF, Conditional Random Field).
链式条件随机场 链式条件随机场 (chain-structured CRF) 是 y 呈链式结构 y1−y2−⋯−yn 的条件随机场. 可以定义势函数
p(y∣x)∝exp(i=1∑n−1t(yi,yt+1,xi)+i=1∑ns(yi,xi))
其中 t 是转移特征函数 (transition feature function), 刻画观测序列对相邻标记的影响; s 是状态特征函数 (status feature function), 刻画观测序列对单个标记的影响. 例如状态特征函数
t(yi,yt+1,xi)=1(yi=[V]∧yi+1=[P]∧xi=“knock”)
表示当当前词汇为 knock 时, 当前词汇很可能为动词. 再例如转移特征函数
t(yi+1,yi,xi)=1(yi=[V]∧xi=“knock”)
表示当当前词汇为 knock 时, 当前词汇很可能为动词, 下一个词汇很可能是介词. 势函数可以是转移特征函数和状态特征函数的线性组合的指数.
14.4 学习与推断
假设图模型对应变量 x={xi}i=1n 能分为未知变量 xi0 和已知变量集合 xE={xi}i=i0, 推断问题的目标就是计算条件概率
p(xi0∣xE)=p(xE)p(xE,xi0)=∑xi0p(xE,xi0)p(xE,xi0)
概率图模型解决了联合概率 p(xE,xi0) 的估计方法, 所以还需要考虑如何高效计算边际分布 p(xE)=∑xi0p(xE,xi0).
变量消去 以在有向结构 x1→x2→x3→x4, x3→x5 计算 p(x5) 为例. 基于有向图模型描述的条件独立性, 有
p(x5)=x1∑x2∑x3∑x4∑p(x1)p(x2∣x1)p(x3∣x2)p(x4∣x3)p(x4∣x3)
可以按照 (x1,x2,x4,x3) 的顺序步进地计算
p(x5)=x3∑(p(x5∣x3)x4∑p(x4∣x3)x2∑(p(x3∣x2)x1∑(p(x2∣x1)p(x1))))
这样就将一个四维求和问题转化为了四个一维求和问题.
变量消去法中, 若要计算每个变量的边际分布的算法复杂度是 O(n2), 这是因为很多中间量被重复使用了. 信念传播 (Belief Propagation) 是一种动态规划算法, 它将变量消去法中的中间量存储下来, 可以将算法复杂度降低到 O(n).
14.5 近似推断
近似推断是推断的数值方法.
MCMC 采样 对于已知分布 X∼p(x) 的多元随机变量, 我们常常关注 X 的期望, 即
EX=∫x1∫x2⋯∫xnxp(x)dx1dx2⋯dxn
可以尝试构造出服从该分布的样本 {x(k)}i=1N, 然后求均值
xˉ=N1∑x(k)
作为期望的估计. Markov 链 Monte Carlo (MCMC, Markov Chain Monte Carlo) 方法设法构造一条平稳分布为 p 的 Markov 链, 然后根据该 Markov 链迭代充分多次后的样本作为采样样本.
Gibbs 采样方法是一种常见的 MCMC 方法. 它每次随机选取一个变量, 计算它的条件分布 p(xi∣x1,…,xi−1,xi+1,…,xN) 并进行采样更新 xi 的值. 重复迭代, 每次生成一个样本.
14.6 话题模型
话题模型 (topic model) 是一族生成式有向图模型, 可以用于自然语言处理. 隐 Dirichlet 分配模型 (LDA, Latent Dirichlet Allocation) 是话题模型的典型代表.
假设词汇表中有 N 种词汇, 有 K 种话题, 第 k 种话题中各种词汇的词频是 βk∼DirichletN(η). 假设一篇文档 (document) 包含 N 个词 {wn}n=1N, 每个词根据以下步骤生成:
- 生成文档的话题分布 θ∼DirichletK(α)
- 对于第 n 个词, 先根据 θ 选取话题 zn, 再根据该话题对应的词频分布 βk 随机采样生成词.
以下考虑话题模型的概率密度. 该模型中的观测变量是文档内的词汇 w={wn}n=1N; 隐变量包括每一个词所属的话题 z={zn}n=1N、该文档的话题分布 θ 和每个话题的词频分布 B={βk}k=1K; 参数包括话题内词频分布的 Dirichlet 参数 α. 所以整个模型的密度函数是
p(w,z,B,θ∣α,η)=n∑p(wn∣zn,B)p(zn∣θ)⋅p(θ∣α)⋅k∑p(βk∣η)
一个常见的问题是给定数据集是一系列文档 W={wi}i=1T, 求参数 α 和 η 的估计. 考虑最大化对数似然
ℓ(α,η∣W)=t∑lnp(w(t)∣α,η)=max
但 p(w(t)∣α,η) 不易求解, 因此常使用变分法求近似解.
另一个常见的问题是给定参数 α 和 η, 给定文档 w, 推断文档对�应的话题结构 (即隐变量 z, θ(t) 及 B(t)). 即求解
p(z,B,θ∣w,α,η)=p(w∣α,η)p(w,z,B,θ∣α,η)
该问题也经常使用 Gibbs 采样或者变分法求解.